Thesis: Simulation‑to‑Real Is No Longer a Lab Trick
Robots that can adapt to messy, unpredictable environments are finally within reach. The key is not a new sensor or a larger motor, but a workflow that moves knowledge from virtual worlds into physical ones without costly re‑training.
Evidence from ICRA 2026
At the International Conference on Robotics and Automation (ICRA) NVIDIA Research presented eight of its 28 accepted papers. All eight focus on simulation‑to‑real transfer, showing how a robot can learn perception, reasoning, and planning in a simulated setting and then apply those skills on a factory floor, a warehouse shelf, or a household countertop.
According to the NVIDIA Newsroom post, these papers collectively demonstrate that the technology is moving from “controlled demos and scripted automation” toward “generalizable, reliable embodied autonomy in the real world.” The work covers the full pipeline: synthetic data generation, domain‑randomization, physics‑accurate simulators, and closed‑loop testing on actual hardware.
Context: From Demo‑Only to Everyday Use
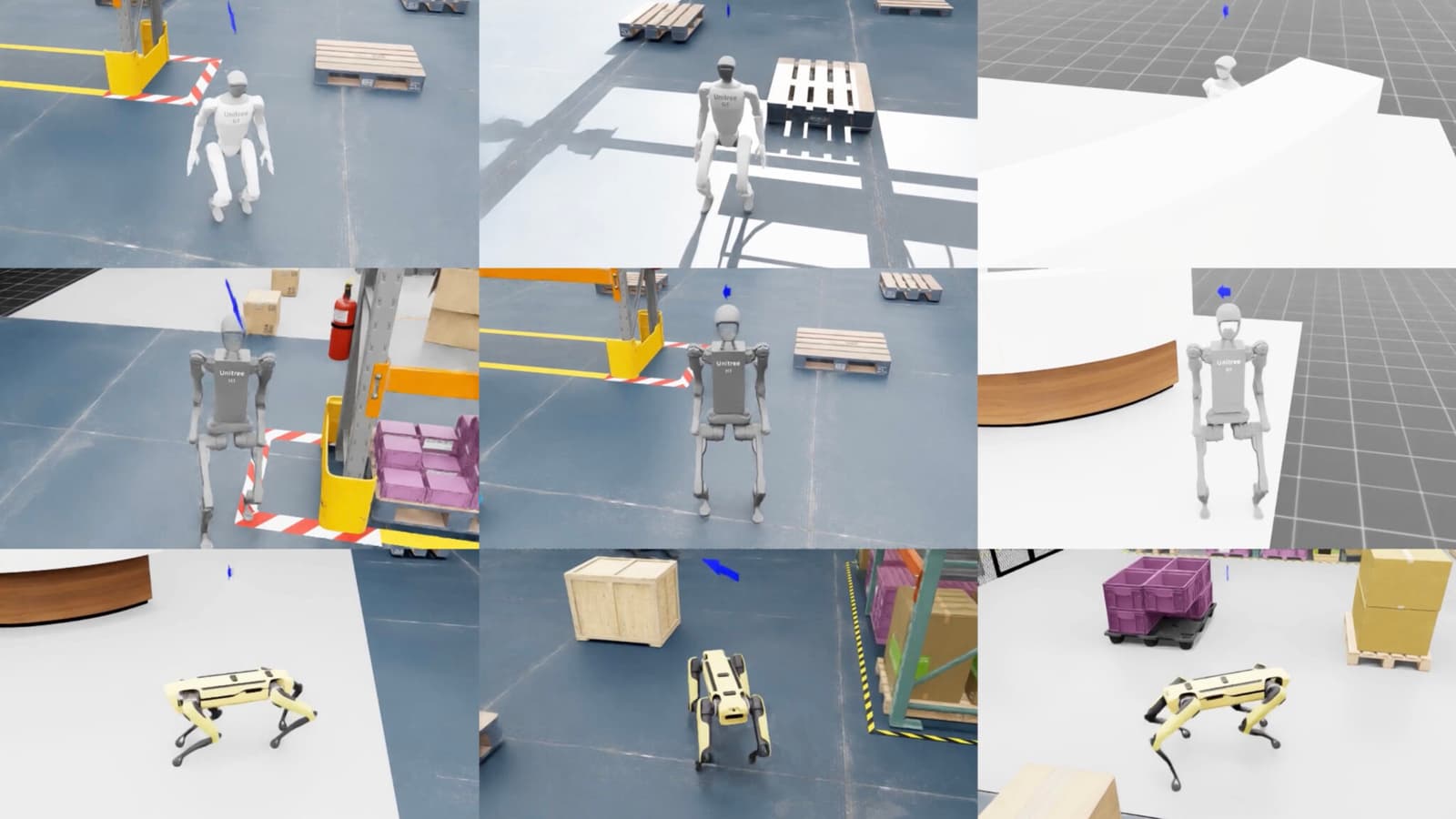
For years, robotics research has been anchored to tidy laboratory setups. A robot would follow a pre‑written script, succeed under bright lights, and fail the moment a human placed a cup slightly off‑center. The simulation‑to‑real approach changes that narrative by exposing learning algorithms to the chaos of virtual environments—varying textures, lighting, object positions, and even sensor noise.
When those same algorithms are deployed on a real robot, the gap between expectation and reality shrinks dramatically. NVIDIA’s effort builds on earlier work that used simple domain randomization; the new papers add richer physics models and tighter integration with NVIDIA’s GPU‑accelerated simulation platform.
Counter‑Arguments: Limits of Virtual Training
Critics argue that no amount of simulated variety can capture the full spectrum of real‑world surprises. Edge cases like a sudden spill, a broken sensor, or an unexpected human gesture may still require on‑site fine‑tuning.
Another concern is compute cost. Running high‑fidelity simulations at scale demands powerful GPUs, which can be prohibitive for small startups. The NVIDIA team acknowledges the expense but points to the long‑term savings from reduced physical testing cycles.
Prediction: A Builder‑Centric Workflow Emerges
Within the next two years, we expect robot developers to adopt a three‑step workflow: (1) generate a diverse virtual dataset, (2) train perception and control models on NVIDIA’s simulation stack, and (3) validate on a single physical prototype before mass deployment. This pattern mirrors what software engineers already do with CI/CD pipelines, but applied to embodied agents.
As the workflow matures, the barrier to entry for new robotics startups will lower. Companies can iterate faster, test safety scenarios that would be dangerous in the real world, and ship products that truly work out of the box.
What It Means for Builders Today
If you are building a robot today, the message is clear: invest in a high‑quality simulator now, and treat the simulation as the primary development environment. The eight NVIDIA papers provide concrete examples of how to structure that pipeline, from data generation to real‑world validation.
By embracing simulation‑to‑real transfer, developers can move past the era of “lab‑only” prototypes and deliver machines that handle the unpredictability of everyday life.
📎 Related Articles
What Google I/O 2026 Dialogues Revealed About AI’s Next Chapter • How OpenAI’s New Deal Brings Brazilian News to ChatGPT • Why OpenAI’s Gartner Leader Status matters for enterprise developers • Your Step‑by‑Step Guide to the 100 Announcements from Google I/O 2026 • What the I/O 2026 Dialogues Stage Told Us About Tomorrow's Tech • How to Use ChatGPT for Healthcare to Boost Whole‑Person Care • What did Google unveil in its 100‑item I/O 2026 lineup? • What Google Unveiled at I/O 2026: A Quick Rundown